| Core Business |
Controller hardware + middleware platform (OEM B2B) |
Application-ready robot control software |
| Hardware |
Designs & manufactures controller boards (GRC, RCB series) with NEXCOM manufacturing infrastructure |
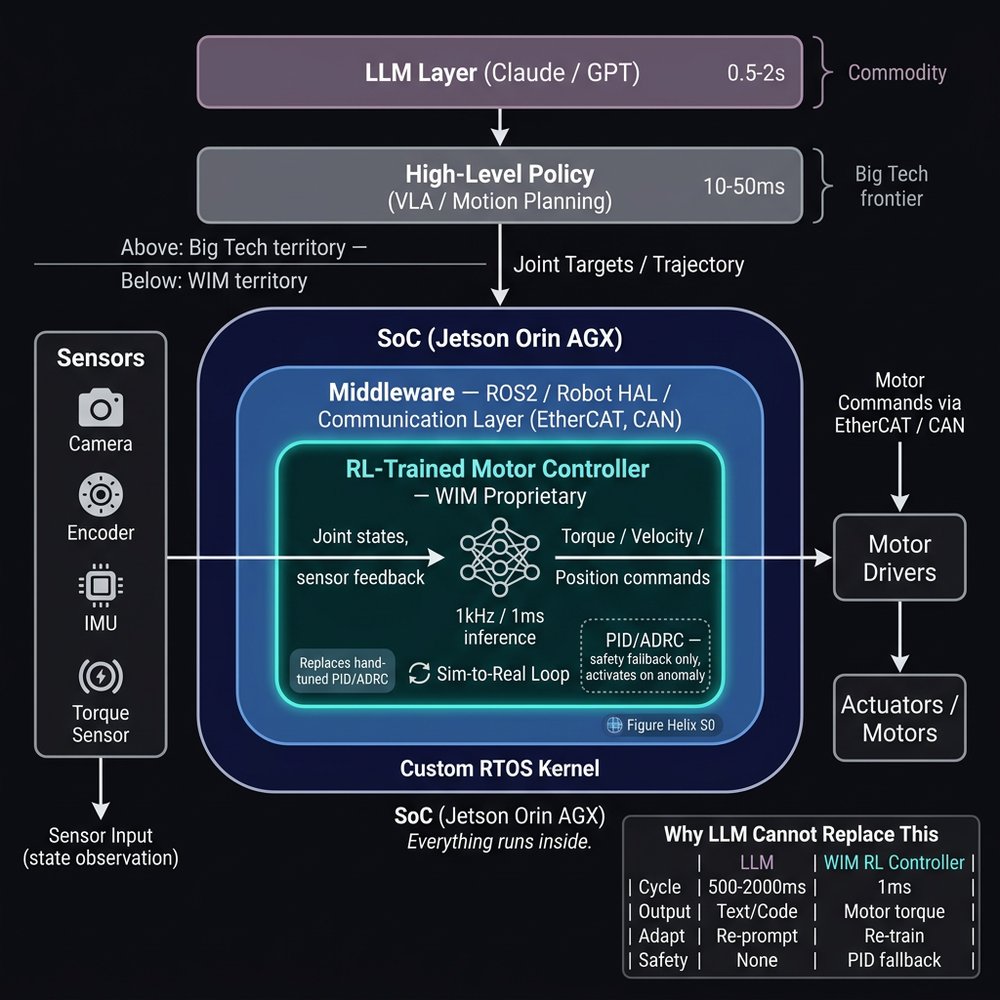
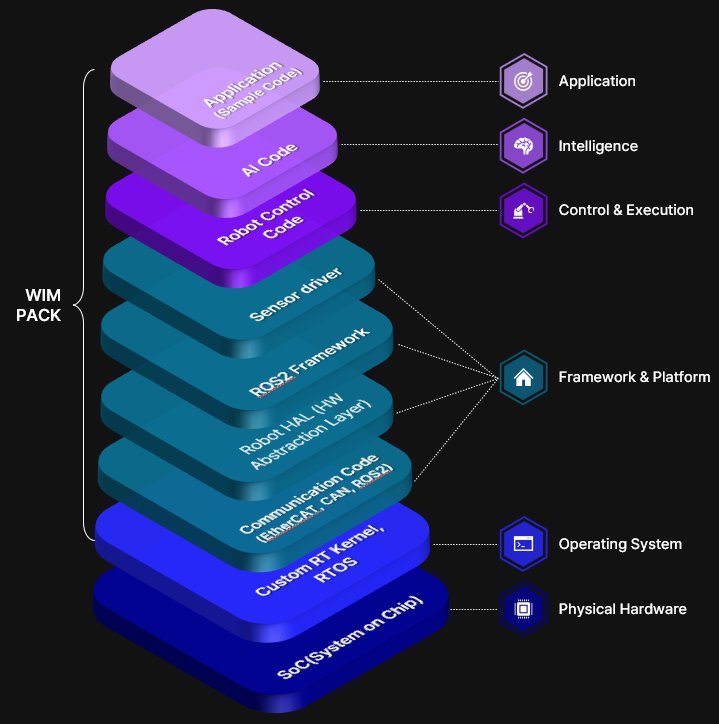
W-RC controller (Jetson Orin AGX based). Hardware is the delivery vehicle for WIMPACK software |
| NVIDIA Relationship |
Official Jetson Thor partner, NVIDIA Halos AI Inspection Lab participant, 10+ year partnership |
Inception member, N&UP (NVIDIA × Korean Gov't startup acceleration), K-Humanoid Alliance |
| Safety Certification |
TÜV SIL3/PLe, ISO 10218 — industry-leading safety credentials |
KOTCA V&V certification, KIRIA robot performance certification. No functional safety cert yet |
| EtherCAT |
10+ years expertise. NexECM master (250µs min cycle), 64 slave support |
EtherCAT + CANopen communication. Focused on control algorithms above the fieldbus layer |
| Control Algorithm |
CiA 402 standard motion control. Advanced algorithms not publicly documented |
ADRC + RL-trained motor controller at 1kHz on Jetson GPU. Published on tech blog |
| Application Layer |
Not provided — GM stated customers build their own applications on NexCOBOT platform |
Directly develops and deploys end-to-end solutions (waste sorting, agriculture, process automation) |
| Customers |
OEM robot builders. 6 published case studies (component supply) |
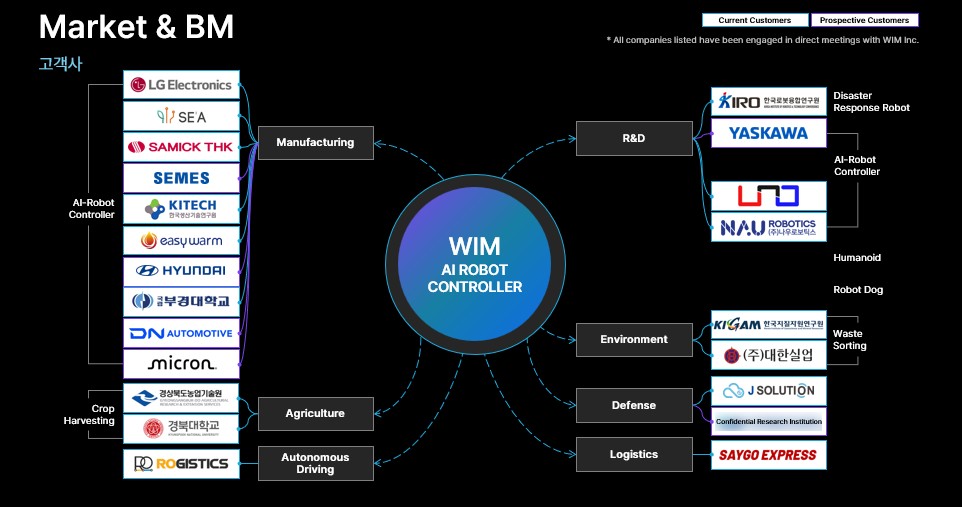
20+ business partners across 8 verticals (LG, SEMES, Hyundai, YASKAWA, etc.) |
| Company Scale |
NEXCOM subsidiary ($160M+ group revenue), 50-100 employees, global offices (5 countries) |
Startup (founded 2021), Pre-A funded, Daegu + Seoul offices |